Saturday March 12, 2016 RSSC Meeting Minutes - CSULB
9:30-10:00 First Official Board Meeting
10:00-11:00 leafproject.org Artificial Intelligence Special Interest Group - Dr. Bruce discusses AI topics (Neato Robotics Lidar, Python programming, navigation)
11:00-12:00 Class on Design by Trish
12:00-12:30 Break for Lunch (bring a snack)
12:30-12:45 Business Meeting
1:00 - Contest: Around the box contest. Bring your own box and have your robot go around the box without touching the box and stop at the starting position. Closest to the original stating position wins!
1:30 - Show-N-Tell - show-off your robots!
** Need something from the old website? RSSC Old Site Copy
9:30-10:00 First Official Board Meeting
10:00-11:00 leafproject.org Artificial Intelligence Special Interest Group - Dr. Bruce discusses AI topics (Neato Robotics Lidar, Python programming, navigation)
11:00-12:00 Class on Design by Trish
12:00-12:30 Break for Lunch (bring a snack)
12:30-12:45 Business Meeting
1:00 - Contest: Around the box contest. Bring your own box and have your robot go around the box without touching the box and stop at the starting position. Closest to the original stating position wins!
1:30 - Show-N-Tell - show-off your robots!
** Need something from the old website? RSSC Old Site Copy
Call to Order
9:30-10:00 Milestone! We had our very first RSSC Board meeting
- We discussed about the idea of a club project. A project we could all participate in and something that will represent the club interest.
There was an autonomous boat proposed, but there might not be enough interest in it. There is also the idea of an autonomous camel jockey, but there was not enough interest either. We proposed the idea on a club built InMoov, but there are too many logistics involved so for now there is not club project.
- Ron brought the idea of a combined effort to solve the corner to corner contest, but Sergei already solved it.
- Walter proposed the idea of having our very own Meetup Group, but we realized that it means we can grow too fast so Walter will have to figure out if there is a new room with more space to meet.
-Ron proposed that Walter edit the website in realtime so that the meeting minutes get done and uploaded during the meeting. Walter agreed and it thought it was a great idea.
10:00-11:00 Artificial Intelligence Interest Group based on the LeafProject.org
Topic: Using the Neato Robotics Lidar sensor and Python for Navigation
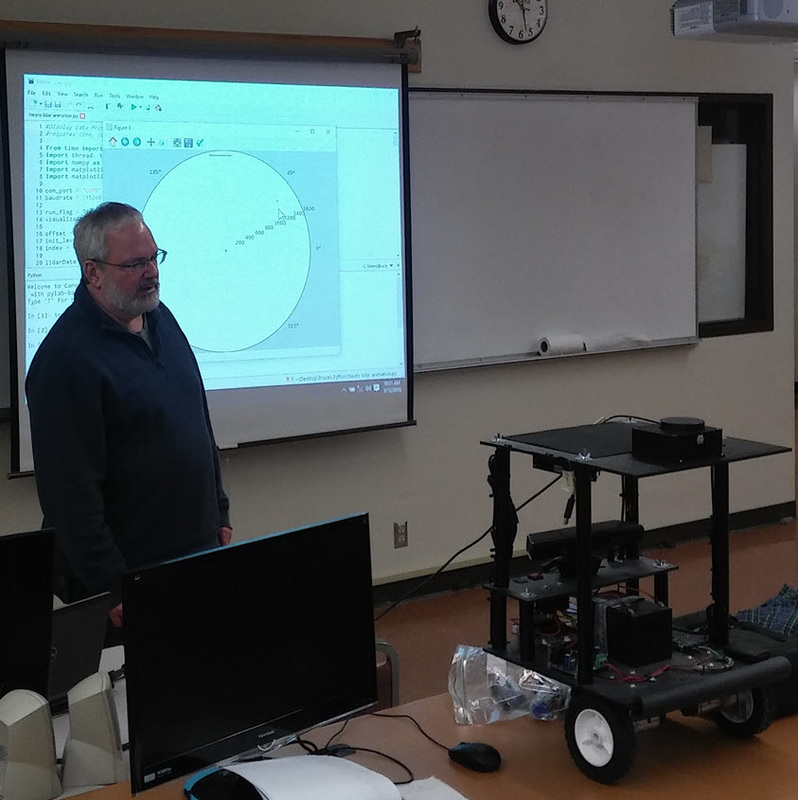
Dr. Bruce purchased a LIDAR sensor and controller from https://www.getsurreal.com/ to experiment with navigation. He demonstrated how he got values from the LIDAR into a graphical interface created in Python. He also pointed out that a lot of the Python code for this sensor was originally created by our very own RSSC member Prof. Mason http://profmason.com/
11:00-12:00 Monthly Class or Guest Presenter (classes and presenters vary every month)
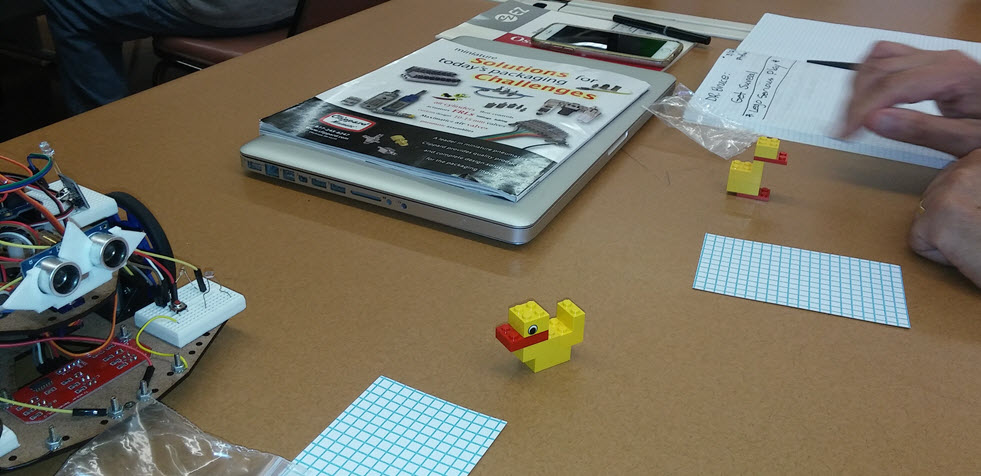
Topic: Class on Design (Lego Serious Play) by Patricia
Patricia had a very interesting and refreshing presentation on creativity and design. We were asked to create a duck from a few Lego parts and most people had different designs. We discussed topics in robotics and to build a Lego structure that signify one of the words below:
AI, Emotion, Personality, Intuition, Cognition, Decision Making
The concept of Lego Serious Play was introduced and consists of the following: Communication, Team Building, Problem Solving, Strategic Thinking, Design Thinking
Everyone had a good time and people found out their creative side
12-12:30 Lunch Break (bring your own lunch or use the university convenience store)
12:30-1:00 Business Meeting
1:00-1:30 Competitions (varies every month)
Competition: Navigate around the box and stop at starting location
Rules: Have your robot go around a box and make it stop exactly where it started. Robot closest to stop on the starting point wins
We had four competitors enter the competition
Eric W. -
Sergei R. -
Jim U. - uses the Basic Stamp
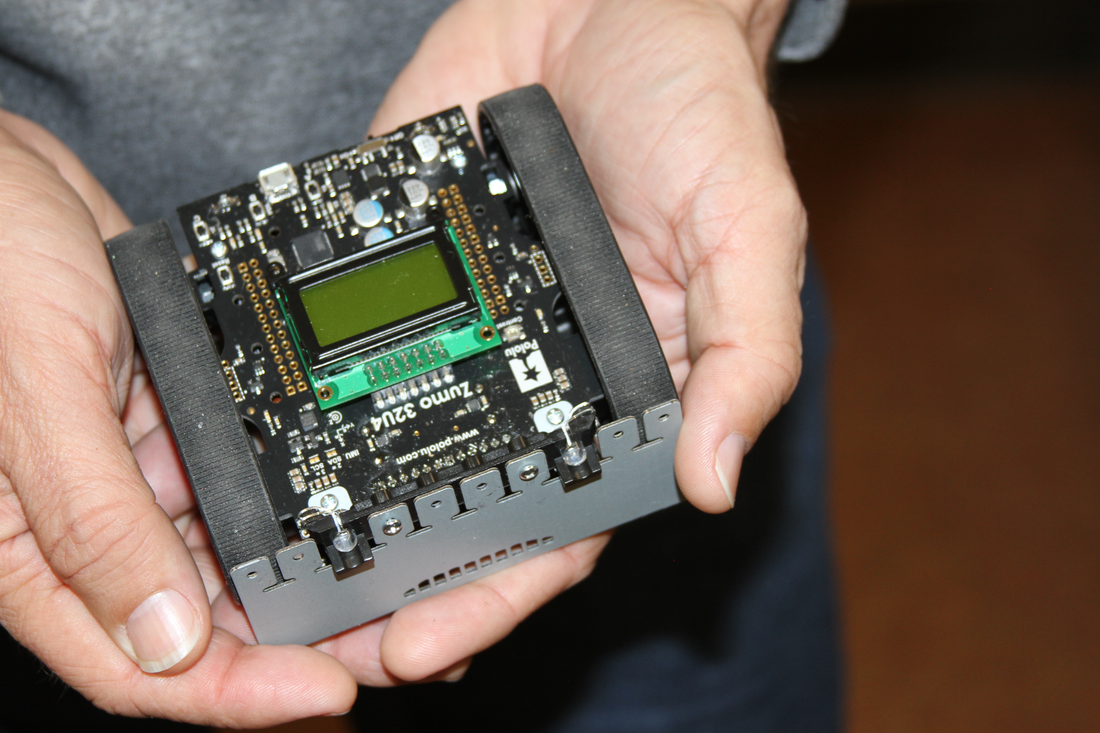
Brian - uses Pololu Zumo - https://github.com/berickson/zumo
Three out of the four competitors were successful at navigating around the box and stop as close as possible at the starting location within 1.5 inches.
1:45-3:00 Show and Tell - bring your robotic creations to demonstrate or ask for help on your projects
1:38 Bob Barboza talked about his involvement in a kids program dealing with robotics and Mars space exploration. http://kidstalkradiola.com/
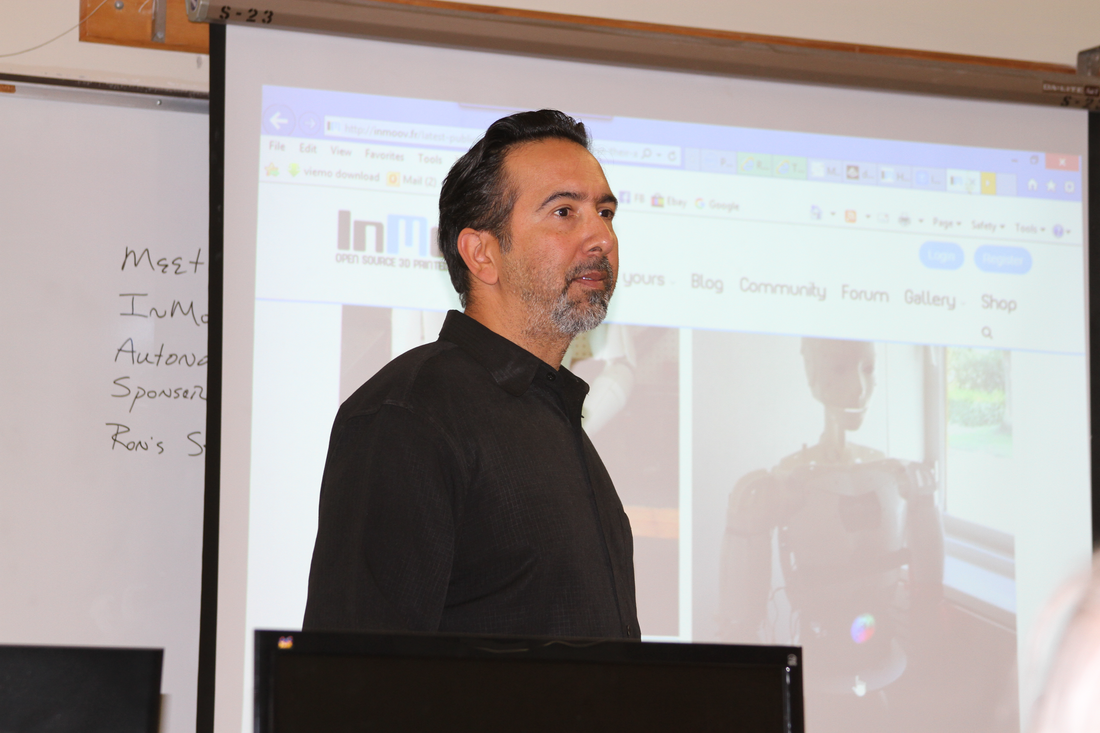
2:00 Walter Martinez talked about his experience in starting to build an InMoov robot. Walter is using the daVinci Plus and also the Robo 3D Plus printers to print his InMoov http://inmoov.fr/. Walter talked about using PLA and ABS and his preference to use ABS because it provides a more smooth finish.
http://robo3d.com/ and http://us.store.xyzprinting.com/us_en/catalog/printer/daVinci11plus
- there are hacks on the Internet using the Arduino UNO to reset the xyz printer cartridges so you can use third party filament
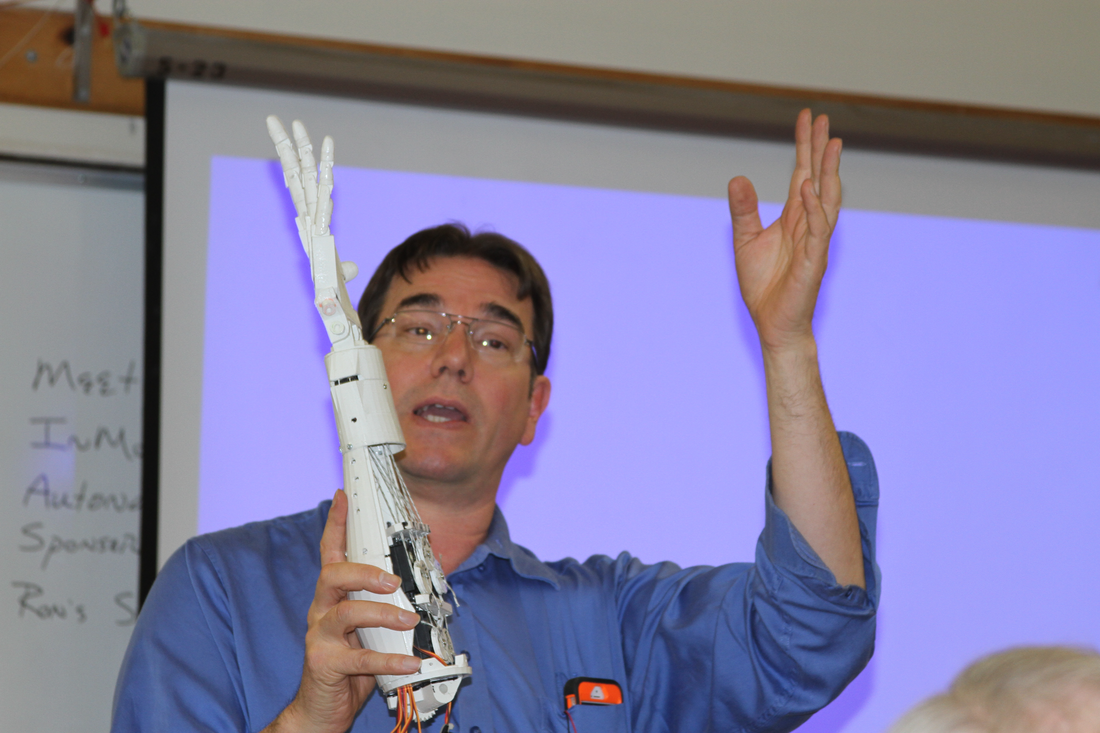
2:24 Thomas presented his InMoov tobot hand and the EzRobot (https://www.ez-robot.com/ ) board for voice recognition. Unfortunately the laptop crashed and he could not do the demonstration.
2:34 Ron - was going to discuss the math behind navigation, but found that Dr. Bruce and others have discussed this problem before
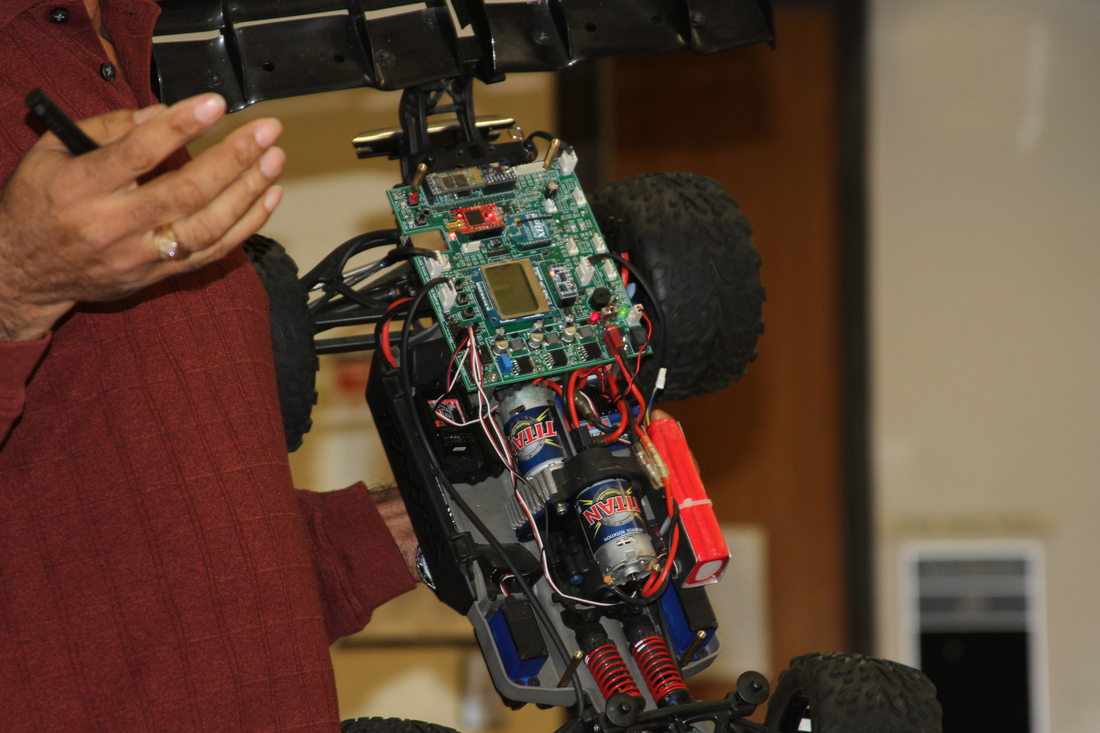
2:39 Ansel - demonstrated his Beaglebone Black ( http://beagleboard.org/bone ) project based on an RC truck.
- used Circuit Maker cloud based software to create his own custom electronic board
- plans to make his project available online - GitHub
- has lidar, encoders and IMU
- Eventually wants to compete in the Sparkfun Autonomous Vehicle competition https://avc.sparkfun.com/
Thanks for attending the meeting!
Don't forget to join our email list: https://groups.yahoo.com/neo/groups/RSSC-list/info
|
|
Photos
1- Dr. Bruce Presenting on Python and the Neato Robotics LIDAR sensor 2. Winners of the Around the Box robot contest 3. Very fast and effective Pololu Zumo 4. Walter Martinez talks about starting a new InMoov robot and his 3D printing experiences 5. Thomas shows his InMoov 3D printed arm with voice command from the EZ Robot board 6. Ansel talks about his experience creating a custom board for this latest autonomous mini DARPA contest from SparkFun 7. Ansel's modified RC truck converted into a fully autonomous robot using the Beaglebone Black. 8. Trish's class on design and cretivity took our thinking to another level 9. Walter's InMoov 3D printed parts so far |