Get me a drink from the refrigerator Contest
http://robothon.org/rules-pop-can-challage/
After looking at the SRS rules, maybe we emphasize that "some" or "all" of the tasks can be performed to allow as many RSSC members to participate in the contest. You can bring your own refrigerator or like it that you create.
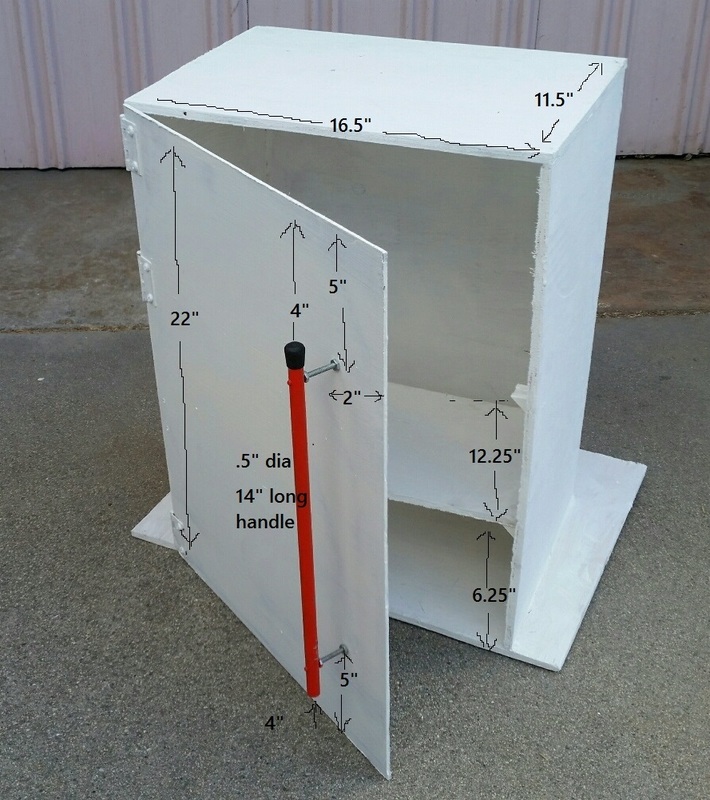
Below are photos of the cardboard refrigerator specifications for those who wish to use that cardboard model for the November contest. It's door-magnet-force is the bare minimum to keep the door closed. Of course everyone can bring their own refrigerator, soda can, or props etc.
Summary of rules
1. Recognize the command to get soda can from refrigerator
2. Go to the refrigerator ( or into a second room to find refrigerator, if contestant wishes)
3. Open the refrigerator door
4. Get the soda can
6. Close the door
7. Robot brings soda can to either the starting line or to a human.
Contest area will be in the right-front corner of the classroom, so that there is enough viewing area. Suggest the refrigerator to be placed anywhere in the front of the classroom or adjacent room, away from the walls, so distance sensors can be used.
Here is the Willow Garage PR2 getting a drink from a refrigerator. There are several camera takes:
https://www.youtube.com/watch?v=FnciXJ9aLps
http://robothon.org/rules-pop-can-challage/
After looking at the SRS rules, maybe we emphasize that "some" or "all" of the tasks can be performed to allow as many RSSC members to participate in the contest. You can bring your own refrigerator or like it that you create.
Below are photos of the cardboard refrigerator specifications for those who wish to use that cardboard model for the November contest. It's door-magnet-force is the bare minimum to keep the door closed. Of course everyone can bring their own refrigerator, soda can, or props etc.
Summary of rules
1. Recognize the command to get soda can from refrigerator
2. Go to the refrigerator ( or into a second room to find refrigerator, if contestant wishes)
3. Open the refrigerator door
4. Get the soda can
6. Close the door
7. Robot brings soda can to either the starting line or to a human.
Contest area will be in the right-front corner of the classroom, so that there is enough viewing area. Suggest the refrigerator to be placed anywhere in the front of the classroom or adjacent room, away from the walls, so distance sensors can be used.
Here is the Willow Garage PR2 getting a drink from a refrigerator. There are several camera takes:
https://www.youtube.com/watch?v=FnciXJ9aLps
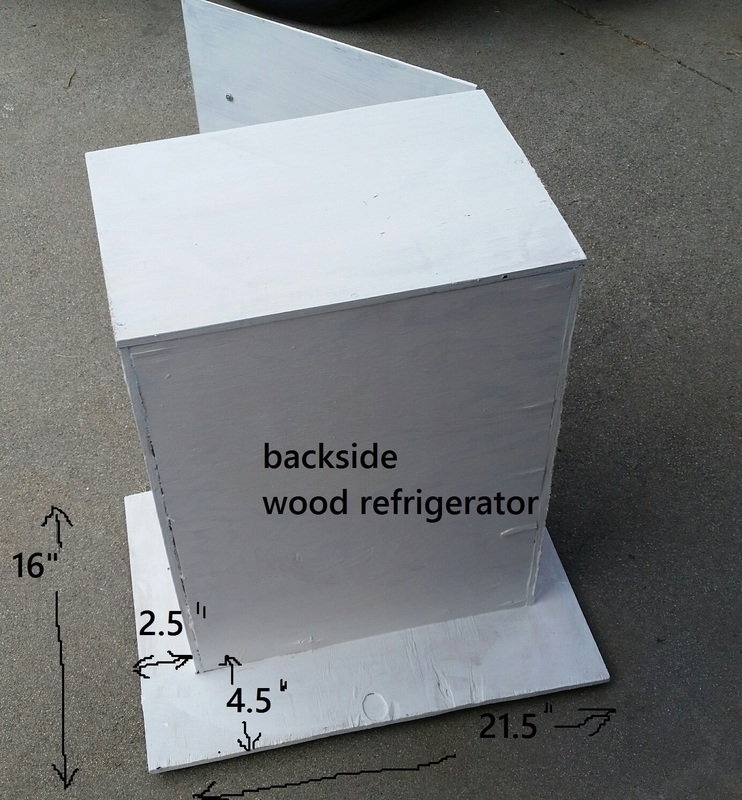
If you do not bring your own refrigerator, RSSC will have one. Is made out of wood with the specs shown below.
Handle is made of Aluminum-- note that an interchangeable red or orange handle can be substituted on either refrigerator to be used for the contest. Removable shelf for 6" or 12" height from bottom of refrigerator, is available. Refrigerator can be turned upside-down for left sided access. If refrigerator is used in the upside-down position (as I will be doing), bottom shelf will not be available without mounting brackets, but most people most likely won't use the shelf, since it is a tough obstacle for adjusting arm height.
Handle is made of Aluminum-- note that an interchangeable red or orange handle can be substituted on either refrigerator to be used for the contest. Removable shelf for 6" or 12" height from bottom of refrigerator, is available. Refrigerator can be turned upside-down for left sided access. If refrigerator is used in the upside-down position (as I will be doing), bottom shelf will not be available without mounting brackets, but most people most likely won't use the shelf, since it is a tough obstacle for adjusting arm height.
A few ideas on navigating a room
I was trying to remember what it takes to navigate across the room properly - which was nicely described in this Spring 2014 course: https://www.coursera.org/course/conrob It turns out that if you search http://youtube.com with something like “Control of Mobile Robots” or even specifically “Control of Mobile Robots 6.3” – all lectures are still there. Here is what is related to competition:
https://www.youtube.com/watch?v=WRyVy576olM - 2.5 Behavior-Based Robotics
https://www.youtube.com/watch?v=Lgy92yXiyqQ - 2.6 Go-to-Goal
https://www.youtube.com/watch?v=bsdBFHMSI2E - 2.8 Obstacle Avoidance
https://www.youtube.com/watch?v=5d1u2hNi_T8 - 6.1 Behaviors Revisited
https://www.youtube.com/watch?v=dj42ZE3clxE - 6.2 Hard Switches vs Blending
https://www.youtube.com/watch?v=WXpIITWrbOg - 6.3 Convex and Non Convex Worlds <--start here if in ahurry! https://www.youtube.com/watch?v=z7NzPln7WTE - 6.4 Boundary Following
https://www.youtube.com/watch?v=MEdMW1hk-HA - 6.5 The Induced Mode
https://www.youtube.com/watch?v=GbST0sDxvG8 - 6.6 A Complete Navigation System
https://www.youtube.com/watch?v=xqKWNc29YQo - 6.7 Practical Considerations
The above is quite complex; here is an Arduino “no-math” approach with code:
https://www.youtube.com/watch?v=LQKHeeMBwbI
https://docs.google.com/document/d/1EULUhXL978xHmIlP4cErjugKC0JFe9WlI5DHhfoc7zo/edit - it is lacking go-to-goal control though.
Can be easily added using one of the 9DOF IMU sensors (https://github.com/Seeed-Studio/Grove_IMU_9DOF) – by making robot choose certain direction. Enjoy,-- Sergei
I was trying to remember what it takes to navigate across the room properly - which was nicely described in this Spring 2014 course: https://www.coursera.org/course/conrob It turns out that if you search http://youtube.com with something like “Control of Mobile Robots” or even specifically “Control of Mobile Robots 6.3” – all lectures are still there. Here is what is related to competition:
https://www.youtube.com/watch?v=WRyVy576olM - 2.5 Behavior-Based Robotics
https://www.youtube.com/watch?v=Lgy92yXiyqQ - 2.6 Go-to-Goal
https://www.youtube.com/watch?v=bsdBFHMSI2E - 2.8 Obstacle Avoidance
https://www.youtube.com/watch?v=5d1u2hNi_T8 - 6.1 Behaviors Revisited
https://www.youtube.com/watch?v=dj42ZE3clxE - 6.2 Hard Switches vs Blending
https://www.youtube.com/watch?v=WXpIITWrbOg - 6.3 Convex and Non Convex Worlds <--start here if in ahurry! https://www.youtube.com/watch?v=z7NzPln7WTE - 6.4 Boundary Following
https://www.youtube.com/watch?v=MEdMW1hk-HA - 6.5 The Induced Mode
https://www.youtube.com/watch?v=GbST0sDxvG8 - 6.6 A Complete Navigation System
https://www.youtube.com/watch?v=xqKWNc29YQo - 6.7 Practical Considerations
The above is quite complex; here is an Arduino “no-math” approach with code:
https://www.youtube.com/watch?v=LQKHeeMBwbI
https://docs.google.com/document/d/1EULUhXL978xHmIlP4cErjugKC0JFe9WlI5DHhfoc7zo/edit - it is lacking go-to-goal control though.
Can be easily added using one of the 9DOF IMU sensors (https://github.com/Seeed-Studio/Grove_IMU_9DOF) – by making robot choose certain direction. Enjoy,-- Sergei